GAUGE REPEATABILITY REPRODUCIBILITY – ĐÁNH GIÁ ĐỘ TIN CẬY CỦA HỆ THỐNG ĐO LƯỜNG – Gauge R&R – Quản trị 24h
1. Tổng quan về phương pháp gage r và r
Độ lặp lại và khả năng tái lập của phép đo (gr & amp; r) – đánh giá độ tin cậy của hệ thống đo lường, một công cụ thống kê được sử dụng để đo các biến động hoặc sai số trong hệ thống đo lường do thiết bị đo lường hoặc người vận hành gây ra. Thực hiện các phép đo.
Bạn đang xem: Grr là viết tắt của từ gì
- Gage: Một công cụ hoặc thiết bị được sử dụng để thực hiện các phép đo. Ví dụ: thước cặp, cân điện tử, ..
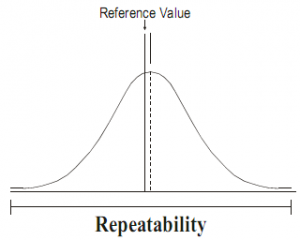
- độ lặp lại – Độ lặp lại của độ lệch khi cùng một người đo nhiều lần với cùng một dụng cụ đo. Ví dụ: đối với cùng một mẫu sản phẩm, người QC dùng thước cặp kỹ thuật số (điện tử) để đo mẫu n lần thì ta có n kết quả, các kết quả đo này có thể giống nhau hoặc khác nhau, theo kết quả thống kê về độ lặp lại. phương pháp, chúng tôi có thể đo Sai số cho phép để xác nhận thước cặp này có sẵn.
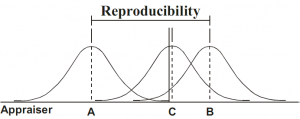
- tái lập – tái lập: Mức độ sai lệch khi đo các thành phần trên cùng một dụng cụ đo bởi những người thử nghiệm khác nhau. Ví dụ, trong một phòng qc bạn có 3 người sử dụng cùng một thiết bị đo, làm thế nào để bạn chứng minh rằng 3 người này có cùng một số đo đủ tin cậy, công cụ này sẽ giúp bạn hiểu được điều đó.
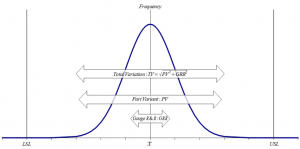
Các nhà sản xuất không ngừng nỗ lực để cải thiện chất lượng sản phẩm và quy trình sản xuất của họ và giảm bớt một phần sự thay đổi trong quy trình của họ. Trên thực tế, sự thay đổi tồn tại trong mọi quá trình sản xuất. Hầu hết chúng ta sử dụng các công cụ thống kê spc để kiểm soát chất lượng sản phẩm, nhưng sự thành công của bất kỳ hệ thống spc nào phụ thuộc vào độ chính xác của dữ liệu thu được từ quá trình đo lường. Thật không may, tất cả dữ liệu đo lường đều chứa một số phần trăm độ rung (phương sai, độ biến thiên). Rung động là sự chênh lệch giữa giá trị thực tế và giá trị quan sát. Phép biến đổi thể hiện lượng sai số đo. Ngoại trừ lỗi đo lường, phần còn lại là các biến thể thực tế trong sản phẩm hoặc quy trình. Để đảm bảo các phép đo của chúng tôi là chính xác, chúng tôi phải xác định xem lượng biến thiên có thể chấp nhận được hay không. Một công cụ hữu ích để đánh giá sự thay đổi của phép đo là độ lặp lại và độ lặp lại của gage (Gage r & r). Do đó, tổng số chuyển đổi chung cho quá trình này bao gồm 3 phần:
• Thay đổi sản phẩm / quy trình thực tế (thiết bị đeo được,…).
• Biến đổi do thiết bị đo (độ lặp lại: thiết bị đo hoạt động không ổn định …).
• Sự khác biệt giữa các nhà khai thác (khả năng tái tạo – khả năng của những người khác nhau).
Mọi người sử dụng phương pháp này để đánh giá xem phương pháp đo lường của bạn có hoạt động hay không. Thông thường, bạn sử dụng thước cặp, máy đo kích thước, máy đo khác, … để đảm bảo rằng thiết bị và con người vận hành cho một số kết quả đo đáng tin cậy, sau đó bạn phải đánh giá xem phương pháp đó có cho kết quả ổn định và chính xác hay không?
Chúng ta cũng nên kiểm tra định kỳ xem có những thay đổi nào trong quy trình làm ảnh hưởng đến kết quả đo không? Điều này chứng tỏ phương pháp đo và quá trình đo cho dữ liệu đáng tin cậy.
2. Thực thi
- Chọn n mẫu đo (để đánh giá kiểm soát quá trình đo, n 10 mẫu, để ước tính sai số của máy đo ổn định, lấy n≥30), n mẫu không được lấy liên tục từ dây chuyền sản xuất mà lấy 10 mẫu trên trong một khoảng thời gian nhất định, đảm bảo việc lấy mẫu và đánh giá rung động theo từng thời điểm, thay vì từng thời điểm.
- Một điểm lưu trữ. Lưu ý khi chọn 10 mẫu, nên chọn 3 mẫu gần giới hạn dưới, 4 mẫu gần giữa và 3 mẫu gần giới hạn trên để đảm bảo đủ cỡ mẫu. Nếu xét gần mà phạm vi không đủ rộng dẫn đến một số hỏng hóc.
- Đánh dấu một mẫu ngẫu nhiên từ 1 đến n để dấu không thay đổi số đo.
- Chọn đồng hồ bạn muốn đo (đồng hồ này phải hoạt động), hiệu chỉnh đồng hồ về giá trị chính xác;
- Chọn 3 người để đo;
- Đo lường , lặp lại 3 lần cho mỗi người trên cùng một mẫu và trên cùng một thiết bị đo
Số lượng mẫu
Nhân viên
Nhân viên
c Nhân viên
Lần đầu tiên
Lần thứ hai
Lần thứ ba
Sự khác biệt
kéo
Lần đầu tiên
Lần thứ hai
Lần thứ ba
thiên vị rb
Lần đầu tiên
Lần thứ hai
Lần thứ ba
Sự khác biệt
rc
1
a11
a21
a31
b11
b21
b31
c11
c21
c31
2
a12
a22
a32
b12
b22
b32
c12
c22
c32
3…
–
–
–
–
–
–
–
–
–
n
a1n
a2n
a3n
b1n
b2n
b3n
c1n
c2n
c3n
x̅
x̅a1
x̅a2
x̅a3
x̅ b1
x̅ b2
x̅ b3
x̅c1
x̅c2
x̅c3
2.1. Tính p Độ lặp lại
- lặp lại ev (Biến thể thiết bị) Cho biết một Biến thể do thiết bị tạo ra.
- ra1 = max (a11, a21, a31) – min ((a11, a21, a31); (lấy số lớn nhất – số nhỏ nhất = độ lệch)
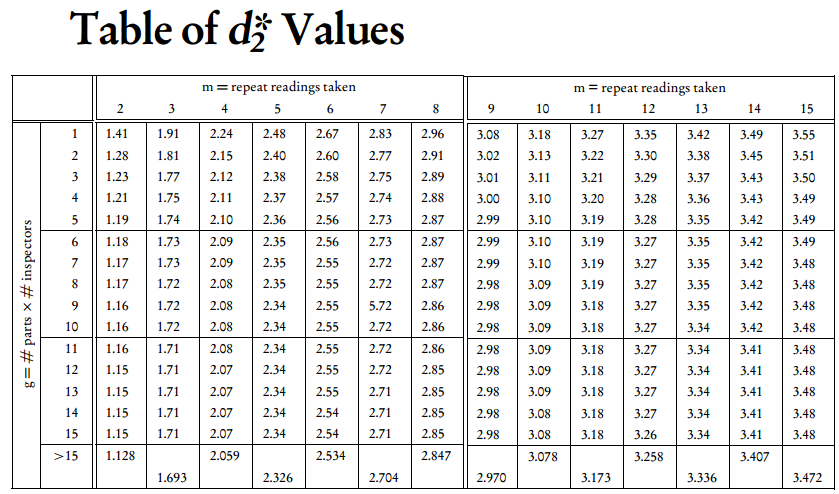
Trong đó d2 được tính theo bảng dưới đây, trong đó m là số lần lặp lại và g là số nhóm con (g = số người trả lời x số mẫu).
2.2. Tính hai lần Khả năng:
Độ lặp lại av (biến thể người xếp hạng) đại diện cho sự thay đổi do người đo lường tạo ra.
Để tính toán độ tái lập, còn được gọi là độ biến thiên của trình xác thực (av), hãy sử dụng công thức sau:
av = ((xdiff * k 2) 2 – (ev) 2 / (n * r))
với:
- av = độ lặp lại
- x̅ diff = [max x̅appraiser] – [min x̅appraiser]: dải toán tử trung bình
- ev = khả năng tái tạo lại
- k 2 = bảng tra cứu
- n = số lượng mẫu được đo
- r = số lần thử nghiệm (lặp lại) trên mỗi mẫu.
Tìm k 2:
- Tìm giá trị của k2 cần dùng để tìm d2. Đối với điều này, bạn sẽ cần m và g một lần nữa. Nhưng chúng tôi sẽ sử dụng một số khác cho m.
- m là kích thước nhóm con. Đây là số toán tử khi k2 được tìm thấy.
- g là số nhóm con = số mẫu x số quan sát viên.
2.3. Tính điểm r & amp; r
Như mong đợi, gage r & amp; r được tính bằng cách kết hợp các chỉ số độ lặp lại và độ lặp lại, sử dụng công thức sau:
với:
- av = độ lặp lại
- ev = độ lặp lại
Nếu kết quả tính toán cho thấy rằng av lớn hơn ev, thì sai số do thiết bị đo gây ra lớn hơn thiết bị đo và chúng tôi đặt ra mục tiêu cải tiến hoạt động của thiết bị đo và đánh giá lại khả năng của thiết bị đo. thiết bị đo lường;
Nếu kết quả tính toán hiển thị av & lt; ev, thì sai số do thiết bị gây ra lớn hơn sai số do thiết bị đo gây ra và chúng tôi tiếp tục cải tiến thiết bị đo.
2.4. Tính pv, tv và ndc
pv, tv, grr được phân biệt bằng hình sau:

pv (biến thể một phần) = rp x k3, với
- rp = (max x̅part – min x̅part);
- Tìm hệ số k3 theo bảng sau:
Các bộ phận
2
3
4
5
6
7
8
9
10
k3
0,7071
0,5231
0,4467
0,403
0,3742
0,3534
0,338
0,325
0,3136
- tv (tổng biến thể) = √ (grr 2 + pv 2)
- ndc = √2 (pv / grr) = 1,41 (pv / grr).
Bình phương của grr và pv không nhận giá trị âm vì đôi khi tv phủ định không có ý nghĩa.
ndc là số loại phép đo có thể được phân biệt một cách đáng tin cậy. Nói một cách dễ hiểu, có thể đếm số lần độ lặp lại và độ tái lập của thiết bị phù hợp với biến quá trình thực tế.
- ndc ≥ 5 đạt, ndc
- 5 không đạt. Số 5 có nghĩa là cuộc khảo sát phải bao gồm tất cả 5 khu vực của hình dạng chung khảo sát, như hình dưới đây.
Bạn luôn giảm số lượng ndc trừ khi nó nhỏ hơn 1. Nếu nó nhỏ hơn 1, bạn phải làm tròn. Hệ số 1,41 (= √2) không liên quan đến khoảng tin cậy 97%. Nó được tính toán từ tỷ lệ thay đổi được đưa ra trong biểu đồ iso.
Hướng dẫn sử dụng msa nói rằng ndc phải lớn hơn hoặc bằng 5. Ý tưởng đằng sau đặc điểm kỹ thuật này là việc kiểm soát quá trình chỉ có ý nghĩa nếu bạn có thể chia quá trình thành ít nhất 5 loại phép đo khác nhau dựa trên ndc (xem hình). Nghĩa là, hệ thống đo lường phải có khả năng tách biệt sai số của dụng cụ đo và độ rung của đối tượng đo theo năm điểm chung phụ.
2.4. Kết luận
- gage r & amp; r / tv dưới 10% = chấp nhận được – được chấp nhận – không cần thực hiện hành động nào (10%: cho biết rằng tổng lỗi phải nhỏ hơn 10%).
- Từ 10% đến 30% = Biên độ – Chấp nhận được : Nếu ppk nhỏ hơn 1,67, hãy cải thiện phép đo cho đến khi% dung sai nhỏ hơn 10%, nếu ppk lớn, không cần thực hiện hành động nào.
- lớn hơn 30% = không thể chấp nhận – không thể chấp nhận : Phép đo phải cải thiện quy trình để% dung sai nhỏ hơn 10% hoặc nhỏ hơn 30 % và ppk lớn hơn 1,67.
- Đã đạt ndc ≥ 5, không đạt ndc <5.
Tuy nhiên, về mối tương quan giữa% grr và ndc, chúng ta có biểu thức sau:
Vì vậy, ndc là 14 với% grr = 10% và 4 với% grr = 30%. Rất tiếc, giới hạn ndc = 5 được tìm thấy cho% grr = 27,2% không khớp với giới hạn cho% grr <. 10%.
3. Ví dụ thực tế:
3.1. Độ lặp lại và độ lặp lại của máy đo biến thiên – Độ biến thiên (Rung động)
Chọn 3 người đo 3 mẫu sản phẩm và lặp lại 4 lần.
Khi bạn hoàn tất việc ghi lại các phép đo của mình, kết quả của bạn sẽ giống như sau:
3.1. Độ lặp lại và độ lặp lại của máy đo biến thiên – Đo mẫu
Chọn 3 người đo 10 mẫu sản phẩm, lặp lại 3 lần, ta có kết quả như sau
Khi bạn hoàn tất việc ghi lại các phép đo của mình, kết quả của bạn sẽ giống như sau:
Người khảo sát
Lặp lại
Các bộ phận
Trung bình
1
2
3
4
5
6
7
8
9
10
A
1
0,29
-0,56
1,34
0,47
-0,80
0,02
0,59
-0,31
2,26
-1,36
0,194
2
0,41
-0,68
1,17
0,50
-0,92
– 0,11
0,75
0,20
1,99
-1,25
0,166
3
0,64
-0,58
1,27
0,64
-0,84
-0,21
0,66
-0,17
2.01
-1,31
0,211
Trung bình
x̅aj = (x1 + x2 + x3) / 3
0,447
-0,607
1.260
0,537
-0,853
-0.100
0,667
-0.227
2.087
-1,307
x̅a = Ʃx̅aj / n = 0,1903
Điều khoản
raj = xmax – xmin
0,35
0,12
0,17
0,17
0,12
0,23
0,16
0,14
0,27
0,11
Ṝa = raj / n = 0,184
b
1
0,08
-0,47
1,19
0,01
-0,56
-0,20
0,47
-0,63
1,80
-1,68
0,001
2
0,25
-1,22
0,94
1,03
-1,20
0,22
0,55
0,08
2,12
-1,62
0,115
3
0,07
-0,68
1,34
0,20
-1,28
0,06
0,83
-0,34
2,19
-1,50
0,089
Trung bình
x̅bj = (x1 + x2 + x3) / 3
0,133
-0,790
1.157
0,413
-1.013
0,027
0,617
-0,297
2.037
-1,60
x̅b = Ʃx̅bj / n = 0,0683
Điều khoản
rbj = xmax – xmin
0,18
0,75
0,40
1,02
0,72
0,42
0,36
0,71
0,39
0,18
Ṝb = rbj / n = 0,513
c
1
0,04
-1,38
0,88
0,14
-1,46
-0,29
0,02
-0,46
1,77
1,49
-0.223
2
-0,11
-1,13
1,09
0,20
-1,07
-0,67
0,01
-0,56
1,45
-1,77
-0.256
3
-0,15
-0,96
0,67
0,11
-1,45
-0,49
0,21
-0,49
1,87
-2,16
-0.284
Trung bình
x̅cj = (x1 + x2 + x3) / 3
-0.073
-1.157
0,880
0,150
-1.327
-0,483
0,080
-0,503
1.697
-1,807
x̅c = Ʃx̅cj / n = -0,2543
Điều khoản
rcj = xmax – xmin
0,19
0,42
0,42
0,09
0,39
0,38
0,20
0,10
0,42
0,67
Ṝc = rcj / n = 0,328
3.1.1. Trung bình của mỗi mẫu 3 người trả lời
trong đó tôi là số người đo i = a, b, c;
j: là số lượng mẫu, j = 1,2,3…. 10
x̅i1 = Ʃx̅i1 / i = (x̅a1 + x̅b1 + x̅c1) / 3 = {0,447 + 0,133 + (-0,073)} / 3 = 0,169, một lần nữa chúng ta có như sau:
Người khảo sát
Lặp lại
Các bộ phận
Trung bình
1
2
3
4
5
6
7
8
9
10
Trung bình
x̅ij
0,169
-0,851
1,099
0,367
-1.064
-0,186
0,454
-0,342
1.940
-1,571
= x̅ij / n = 0,0014
3.1.2. Tính số đo cho từng người đo
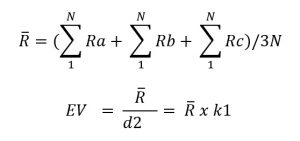
3.1.3. Tính 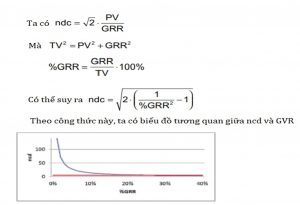
= ([Ṝa = 0,184 ] + [Ṝb = 0,513 ] + [Ṝc = 0,328 ]) / [Số người được đo = 3 ] = 0,3417
3.1.4. Tính rp
rp = max x̅ij – x̅ijmin = [x̅9 = 1,940] – [x̅10 = – 1,571] = 3,511
3.1.5. Tìm k 1
Thường lặp lại = 3, sau đó k1 = 0,5908, lặp lại = 2, sau đó k1 = 0,8862
Cách tính k1 như sau:
Tra bảng d2 để tìm giá trị d 2 để tra k 1. Đối với điều này, bạn cần hai biến:
m là kích thước nhóm con. Đây là số lần mỗi phép đo được lặp lại khi k1 được tìm thấy. Vậy m = 3.
g là số nhóm con. Đây là số lượng kết hợp của số lượng mẫu và đồng hồ đo. Trong dữ liệu thử nghiệm chúng tôi sử dụng, có 3 lần chạy (a, b, c) và 10 mẫu (1… 10). Vậy g = 3 x 10 = 30.
Tìm d2 với m = 3 và g = 30, sau đó d2 = 1,693
- d2 = 1,693
- k1 = 1 / d2
- k1 = 1 / 1,693
- k1 = 0,5908
>
4. Tính toán độ lặp lại
Để tính toán độ lặp lại, còn được gọi là phương sai thiết bị (ev), hãy sử dụng công thức sau:
- ev = * (k1)
- ev = 0,3417 x 0,5908
- ev = 0,20188
5. Tìm k 2
Đối với 2 phép đo riêng lẻ, 3 lần lặp lại và 10 mẫu, k2 = 0,7071. Đo 3 người, lặp lại 3 lần, 10 mẫu, k2 là 0,5231
6. Tính toán độ tái lập
Để tính toán độ tái lập, còn được gọi là độ biến thiên của trình xác thực (av), hãy sử dụng công thức sau:
av = ((x diff * k 2) 2 – (ev) 2 / (n * r))
Vị trí:
- av = độ lặp lại
- x diff = dải đo trung bình
- ev = độ lặp lại
- k 2 = 0,5231
- n = số mẫu (1… 10) = 10
- r = số lần lặp lại = 3
av = √ ((x diff * k 2) 2 – (ev) 2 / (n * r))
av = √ ((0,4446 x 0,5) 2 – (0,20188) 2 / (10 * 3))
av = 0,22963
Nếu av là âm, lấy av = 0.
7. Tính r & amp; r điểm đánh giá
Như mong đợi, gage r & amp; r được tính bằng cách kết hợp các chỉ số độ lặp lại và độ lặp lại, sử dụng công thức sau:
Gage R&D r = (ev 2 + av 2)
Vị trí:
- av = độ lặp lại
- ev = độ lặp lại
Vì vậy, hãy sử dụng dữ liệu ở trên:
Gage R&D r = (ev 2 + av 2)
Gage R&D r = ((0,20188) 2 + 0,22963 2)
Gage R & D r = 0,30575
- Tính pv (biến thiên từng phần).
Chúng ta có: pv = rp x k3
trong đó rp = partmax – partmax (trung bình tối đa – trung bình tối thiểu)
rp = 3,511
k3 được tính theo bảng sau:
Các bộ phận
(phần tử)
2
3
4
5
6
7
8
9
10
k3
0,7071
0,5231
0,4467
0,4030
0,3742
0,3534
0,3375
0,3249
0,3146
pv = rp x k3 = 3.511 x 0.3146 (n = 10 mẫu) = 1.10456
- Tính tv,% grr,% pv
- tv = √ (grr 2 + pv 2) = √ (0,30575 2 + 1.10456 2) = 1,14610
- % grr / tv = 100 [0,30575 / 1,14610] = 26,68%
- % pv = 100 [pv / tv] = 100 [1.10456 / 1.14610] = 96,38%
- ncd = 1,41 (pv / grr) = 1,41 (1,10456 / 0,30575) = 5,094 ~ 5
li> li>
-> Vậy% grr = 26,68%, trong khoảng 10%% grr 1,67 chưa chắc đã cải thiện.
-> ndc = 5.094> 5: Hệ thống đo lường được chấp nhận
————————————
Ruan Huang em
Tham khảo:
Phân tích Hệ thống Đo lường – Sách hướng dẫn Tham khảo, Ấn bản thứ tư, Bản quyền 2010, isbn #: 978-1-60-534211-5





